| ヘッダ | math.h |
| 書式 | double cos(double x); |
| 引数 | x … コサインの値を計算する角度(ラジアン単位) |
| 戻り値 | 成功:-1から1までのコサインの値 失敗:不定(errnoにエラーコードが設定される) |
| 解説 | ラジアン単位の角度を引数にして、cos(x)の値を求める関数 |
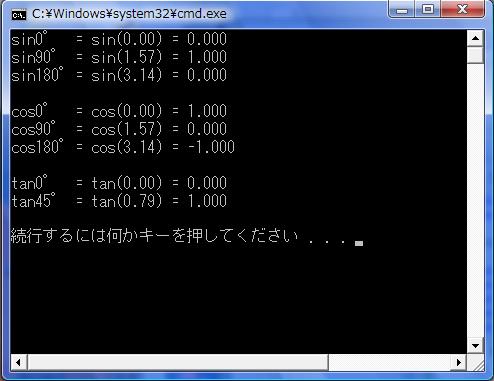
sin()、cos()、tan()を使用したプログラム
/****************************************************************************/
#include<stdio.h>
#include<math.h>
int main()
{
double rad___0; // 0° に対応するラジアン
double rad__45; // 45° に対応するラジアン
double rad__90; // 90° に対応するラジアン
double rad_180; // 180°に対応するラジアン
double pi = 3.1415926535; // 円周率
// ちなみに 2π(ラジアン)=360°(度)です。
rad___0 = 0;
rad__45 = pi / 4;
rad__90 = pi / 2;
rad_180 = pi;
// sin計算
printf("sin0° = sin(%2.2f) = %.3f\n",rad___0, sin(rad___0));
printf("sin90° = sin(%2.2f) = %.3f\n",rad__90, sin(rad__90));
printf("sin180°= sin(%2.2f) = %.3f\n",rad_180, sin(rad_180));
printf("\n");
//cos計算
printf("cos0° = cos(%2.2f) = %.3f\n",rad___0, cos(rad___0));
printf("cos90° = cos(%2.2f) = %.3f\n",rad__90, cos(rad__90));
printf("cos180°= cos(%2.2f) = %.3f\n",rad_180, cos(rad_180));
printf("\n");
//tan計算
printf("tan0° = tan(%2.2f) = %.3f\n",rad___0, tan(rad___0));
printf("tan45° = tan(%2.2f) = %.3f\n",rad__45, tan(rad__45));
printf("\n");
return 0;
}
/****************************************************************************/
Copyright(c) 2010 , cgengor
このWebページの内容を無断で複製または転載することを禁じます。
このWebページの情報を利用することにより発生したいかなる損害について著作権保有者はいっさいの責任を負いません。